电力电子技术
第一章 绪论
电力电子技术是在电子、电力和控制技术基础上发展起来的新兴学科。
电力电子技术的三要素是:器件、拓扑和控制。
根据电能的输入——输出形式来分,主要包含以下四种基本变换
- AC-DC变换: 整流器
- DC-AC变换: 逆变器
- DC-DC变换: 直流变换器、斩波器
- AC-AC变换: 交流变换器、周波变流器
第二章 电力电子器件
电力电子器件的概念和特征
电力电子器件具有以下特点:
- 处理功率大
- 工作在开关状态
- 需要控制电路
- 需要驱动电路
- 功率损耗大
电力电子器件的功率损耗主要包括通态损耗、断态损耗和开关损耗,其中开关损耗又包括开通损耗和关断损耗。
电力电子器件的分类
电力电子器件通常按照能够被控制电路信号所控制的程度分为:
- 不可控器件:功率二极管
- 半控型器件:晶闸管 SCR
- 全控型器件:电力晶体管 GTR,门极可关断晶闸管 GTO,电力场效应管 MOSFET 等
按照控制电路加在电力电子器件控制端和公共端之间信号的性质,全控型器件又可分为电流型和电压型。
根据器件内部导电粒子的性质,全控型器件又可分为单极型、双极型和复合型。器件内部只有一种导电粒子的称为单极型器件,如电力场效应管;具有两种导电粒子的称为双极型器件,如电力三极管;由单极型和双极型复合成的器件称为复合型器件,如绝缘栅双极晶体管 IGBT。
电力电子器件基础
实际上,这一部分在模拟电子技术中已经学习过,但在电力电子技术中,会有更多的补充知识,因此这里再次详细叙述一遍。
PN 结
完全纯净的、结构完整的半导体晶体称为本征半导体;在掺入杂质后,形成的半导体称为杂质半导体。在掺杂后,会引入多子,同时由于热激发,会产生少量少子。
载流子因为热运动而从高浓度区向低浓度区的扩散称为扩散运动,而由于电场的作用使载流子运动称为漂移运动。内电场的增强会削弱扩散运动,增强漂移运动。
当 P 型半导体和 N 型半导体接触时,P 型半导体中的多子(空穴)会向 N 型半导体扩散,而 N 型半导体中的多子(电子)会向 P 型半导体扩散。由于两种载流子在接触面处的复合,形成了一个电荷中性区,称为空间电荷区。
PN 结包含三种反向击穿形式:雪崩击穿(高电压)、齐纳击穿(高掺杂)和热击穿。
PN 结包含势垒电容和扩散电容(存储电容)。
不可控器件——功率二极管
功率二极管有三种典型应用:整流、续流、钳位。
基本结构与工作原理
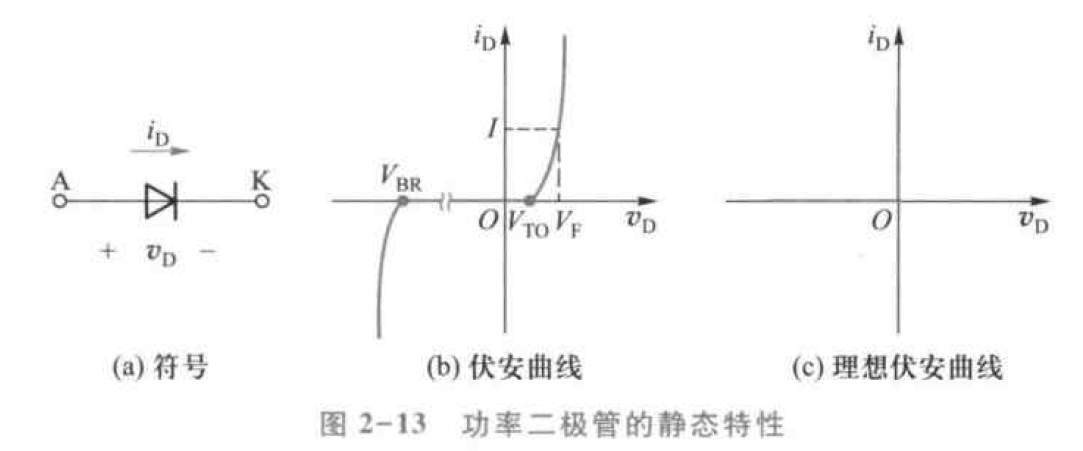
功率二极管本质也是 PN 结,但由于其结构和材料的不同,具有更大的电流和电压承受能力。功率二极管与信息电子二极管相比,具有以下特点:
- 功率二极管体积更大
- 功率二极管大都是垂直导电结构
- 功率二极管在 P 区和 N 区之间多了一层低掺杂 N- 区,因此功率二极管的结构也被称为 P-i-N 结构
由于电导调制效应,功率二极管尽管有低掺杂区,其正向压降仍然较小。
功率二极管是负温度系数的,即温度升高时,电阻减小。
静态特性
动态特性
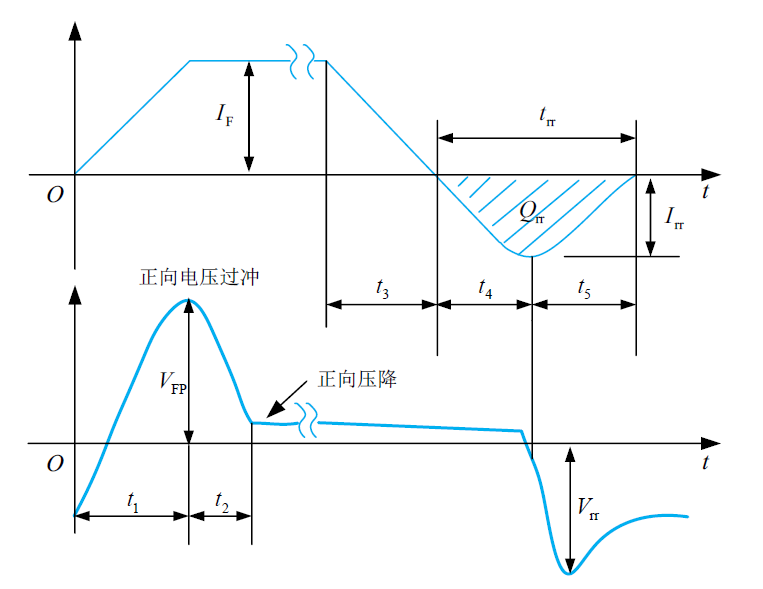
由正向偏置转为反向偏置后,功率二极管并不能立即关断,而是会有一个反向恢复过程。图中 $t_3$ 末期,电流下降为零,但是由于功率二极管的空间电荷区两侧(特别是多掺杂 N 区)储存有大量少子,在外加电压的作用下被抽出二极管,流过较大的反向电流。由于寄生电感的作用,二极管将产生很大的反向电压 $V_\mathrm{rr}$ 。
定义如下重要参数:
- 延迟时间 $t_\mathrm{d}=t_4$:从反向恢复电流开始上升到反向恢复电流到达最大的时间。
- 电流下降时间 $t_\mathrm{f}=t_5$:从反向恢复电流到达最大到反向恢复电流下降到零的时间。
- 反向恢复时间 $t_\mathrm{rr}=t_\mathrm{d}+t_\mathrm{f}$:从反向恢复电流开始上升到反向恢复电流下降到零的时间。
- 恢复特性的软度(恢复系数) $S_\mathrm{r}=\frac{t_\mathrm{f}}{t_\mathrm{d}}$:恢复系数越大,恢复性能越软,尖峰、振荡越小。
由反向偏置到正向偏置时,功率二极管也会有一个正向恢复过程。出现电压过冲的原因是电导调制效应起作用需要一定时间。
肖特基二极管
肖特基二极管是由金属和 N 型半导体接触形成的 PN 结,具有以下特点:
- 多子导电的单极性器件
- 反向恢复时间极短
- 损耗小
- 反向耐压能力弱
二极管的主要类型
普通二极管
又称为整流二极管,适用于开关频率不高 (1 kHz 以下) 的场合,反向恢复时间长。
快恢复二极管
适用于开关频率较高 (1 kHz 至 10 kHz) 的场合,反向恢复时间短。多用于 DC-DC 电路。
肖特基二极管
属于多子器件,反向恢复时间极短,正向恢复过程中也不会有明显的电压过冲。
半控型器件——晶闸管
适用于大功率、低开关频率场合。
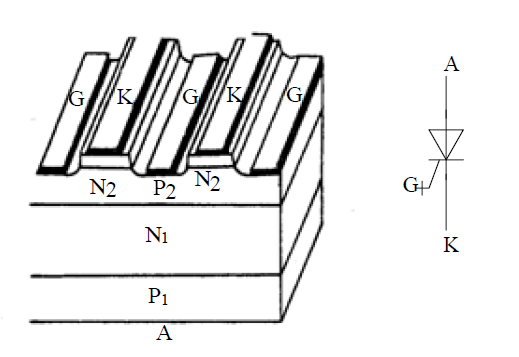
基本结构与工作原理
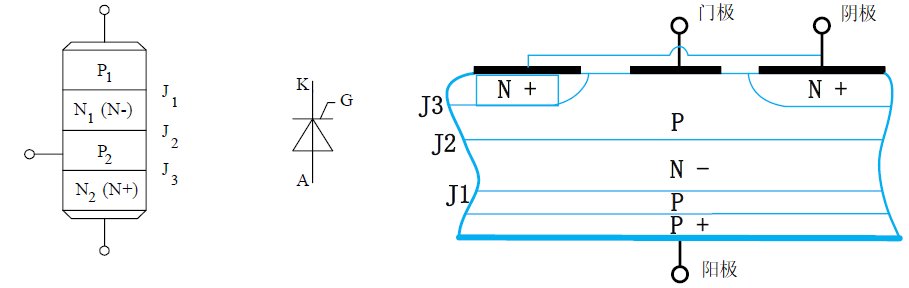
晶闸管是三端四层结构,具有 P-N-P-N 结构。如果把晶闸管斜切一刀,则可以看做 PNP 和 NPN 两个三极管的组合。
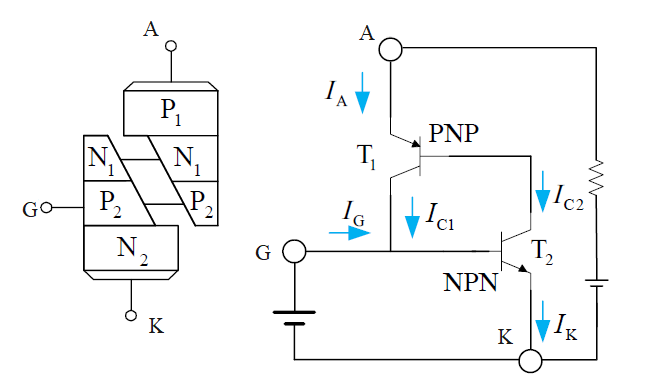
如图,当 G 极加上电压后,三极管 $T_2$ 导通,$T_1$ 也会导通。此时正反馈形成,即使去掉 G 极的电压,晶闸管仍然会导通。我们可以列出如下方程
其中,$\alpha_1$ 和 $\alpha_2$ 分别是 $T_1$ 和 $T_2$ 的共基极电流增益;$I_\mathrm{CBO1}$ 和 $I_\mathrm{CBO2}$ 分别是 $T_1$ 和 $T_2$ 的共基极漏电流。由此可以解得
所以,导通时有 $ \alpha_1+\alpha_2 \approx 1 $ 。
静态特性
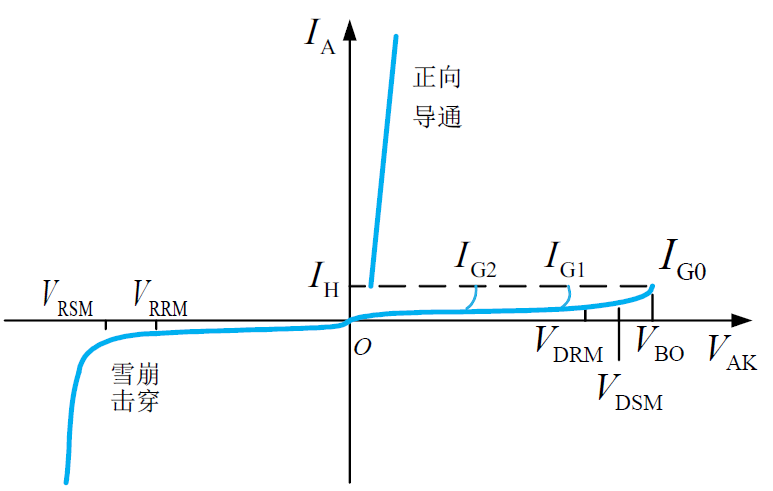
图中,$V_\mathrm{DRM}$, $V_\mathrm{RRM}$ 是晶闸管的正反向断态重复峰值电压;$V_\mathrm{DSM}$, $V_\mathrm{RSM}$ 是晶闸管的正反向断态不重复峰值电压;$V_\mathrm{BO}$ 是晶闸管的正向转折电压;$I_\mathrm{H}$ 是晶闸管的维持电流。
晶闸管的额定电压是正反向断态重复峰值电压 $V_\mathrm{DRM}$ 和 $V_\mathrm{RRM}$ 中的较小值。
维持电流是指使晶闸管维持导通的最小电流。另一个概念是擎住电流 $I_\mathrm{L}$,是指使晶闸管从关断状态转为导通状态并移除触发信号的最小电流,一般为维持电流的 2~4 倍。
动态特性
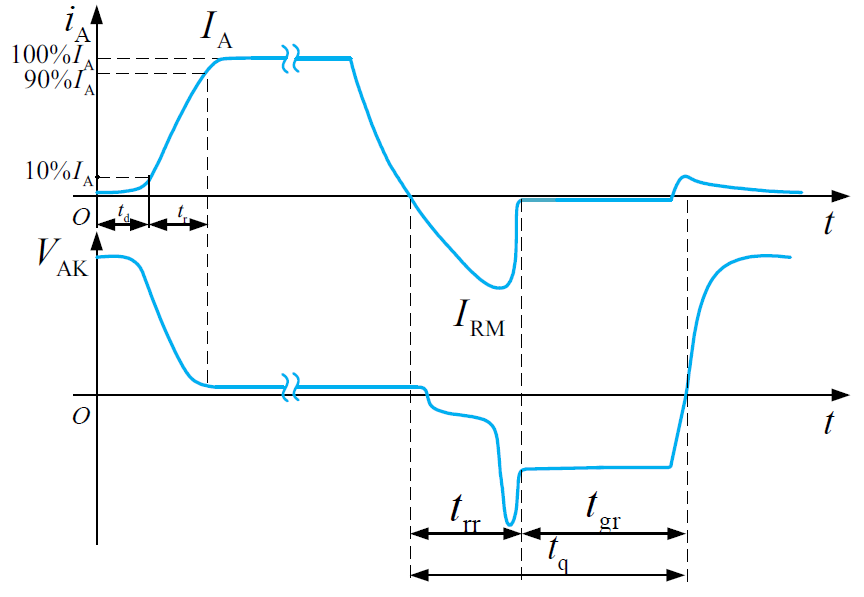
图中,$t_\mathrm{d}$ 是延迟时间,指从门极电流阶跃时刻开始,到阳极电流上升到稳态值的 10% 的时间;$t_\mathrm{r}$ 是上升时间,指从阳极电流从稳态值的 10% 上升到稳态值的 90% 的时间;开通时间 $t_\mathrm{on}=t_\mathrm{d}+t_\mathrm{r}$ 。
$t_\mathrm{rr}$ 是反向阻断恢复时间,指从正向电流下降到零到反向电流下降到零的时间;$t_\mathrm{gr}$ 是正向阻断恢复时间,在反向恢复过程结束后,由于载流子的复合过程比较慢(PN 结中的少子难以通过外电路抽取),晶闸管恢复正向阻断电压的能力需要一定时间。关断时间 $t_\mathrm{off}=t_\mathrm{rr}+t_\mathrm{gr}$ 。
全控型器件——门极可关断晶闸管
门极可关断晶闸管拥有晶闸管全部的优点,同时可以通过门极施加负的脉冲信号关断。
基本结构与工作原理
在晶闸管一章,我们已经学习到,导通电流 $I_\mathrm{A}=\displaystyle\frac{\alpha_2I_\mathrm{G}+I_\mathrm{CBO1}+I_\mathrm{CBO2}}{1-(\alpha_1+\alpha_2)}$。而 GTO 具有以下特点,使其能够自主关断:
- 设计 $\alpha_2$ 较大,使晶体管 $T_2$ 控制灵敏
- 导通后 $\alpha_1+\alpha_2$ 更接近于 1
当然,这样的设计也导致了其管压降比较大。
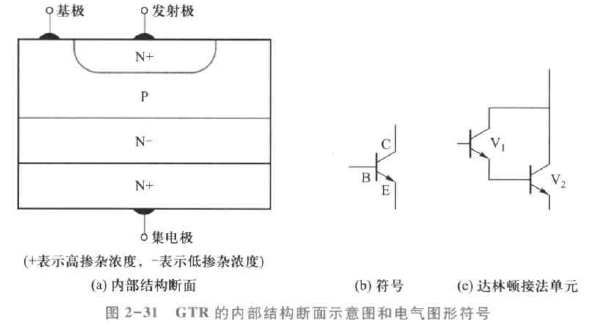
全控型器件——电力晶体管
基本结构与工作原理
电力晶体管比普通三极管能够承受更高的电压,这是因为其在普通三极管的基础上增加了低掺杂 N- 层。
全控型器件——电力场效应晶体管
电力场效应晶体管分为结型 JFET 和绝缘栅型 MOSFET 两种,都是多子导电型器件。一般而言我们很少用到结型场效应管,所以后文我们以 MOSFET 的学习为主。MOSFET 具有四层结构 N+, P, N-, N+ 。
基本结构与工作原理
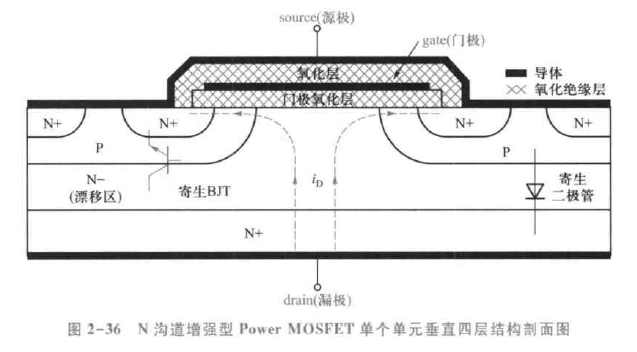
MOSFET 具有正温度系数,易于并联。
动态特性
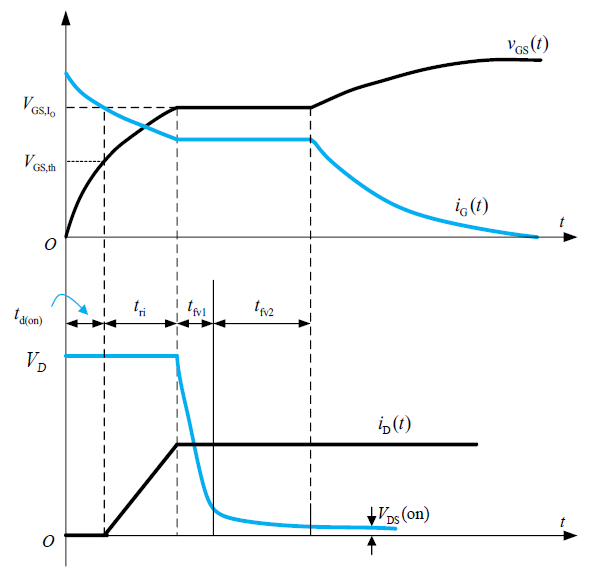
这里只介绍米勒平台的形成。
第一阶段,$t_\mathrm{d}$ 时段,此阶段对 $C_\mathrm{GS}$ 和 $C_\mathrm{GD}$ 两个电容充电。$V_\mathrm{D}$ 保持不变,所以主要考虑对 $C_\mathrm{GS}$ 的充电直至其达到开启电压 $V_\mathrm{GS,th}$(大约2-3V),从而结束该阶段。
第二阶段,$t_\mathrm{ri}$ 时段,该阶段开始已经达到门极开启电压,$i_\mathrm{D}$ 在此时段开始上升。从二极管到 MOSFET 的换流开始,因为换流结束前二极管仍然有电流,所以 $V_\mathrm{D}$ 仍然被钳位在直流电压。
第三阶段,$t_\mathrm{fv1}$ 时段,该阶段开始时,$i_\mathrm{D}$ 刚达到满载电流,则二极管关断,不再钳位 $V_\mathrm{D}$ 。此时在门极驱动电路对 $C_\mathrm{GD}$ 反向充电作用下,$V_\mathrm{DS}$ 开始快速下降。同时因为 $i_\mathrm{D}$ 已经达到满载电流不变,受跨导曲线的约束,$V_\mathrm{GS}$ 必定不变。综上两个原因,可以认为驱动电路几乎只对 $C_\mathrm{GD}$ 充电,而不再对 $C_\mathrm{GS}$ 充电,$V_\mathrm{GS}$ 不变而形成一个平台,称为米勒平台。
特征总结
- MOSFET 的开关速度和其输入电容的充放电有很大关系
- 多子导电,开关速度快
- 开关时间短,工作频率是主要电力电子器件中最高的
- 多子导电,没有电导调制效应,饱和导通后会等效成一个电阻
- 多用于电压较低的场合
- 具有正温度系数,易于并联,没有二次击穿现象
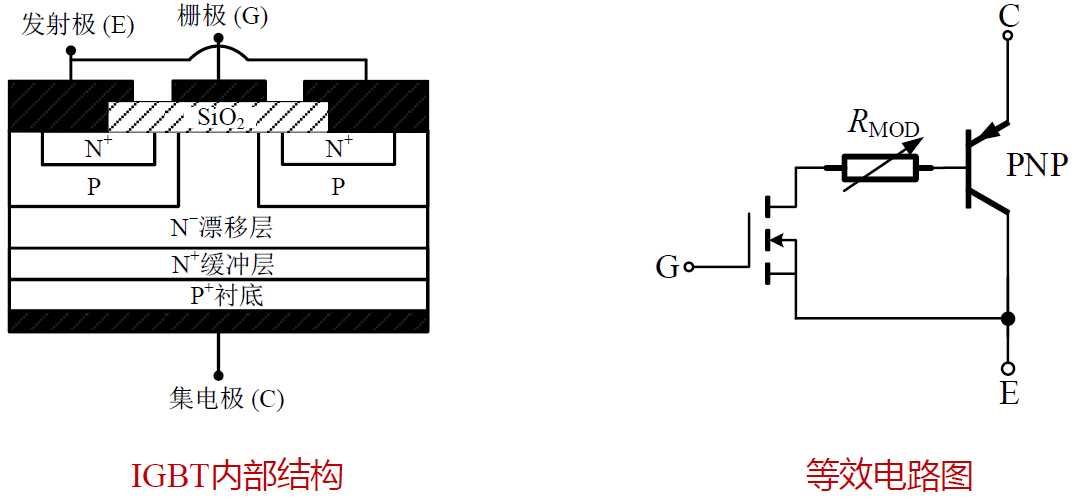
全控型器件——绝缘栅双极晶体管
绝缘栅双极晶体管(IGBT)是 MOSFET 和 GTO 的结合体,具有 MOSFET 的高输入阻抗和 GTO 的高电流密度。IGBT 具有五层结构 N+, P, N-, N+, P 。
基本结构与工作原理
动态特性
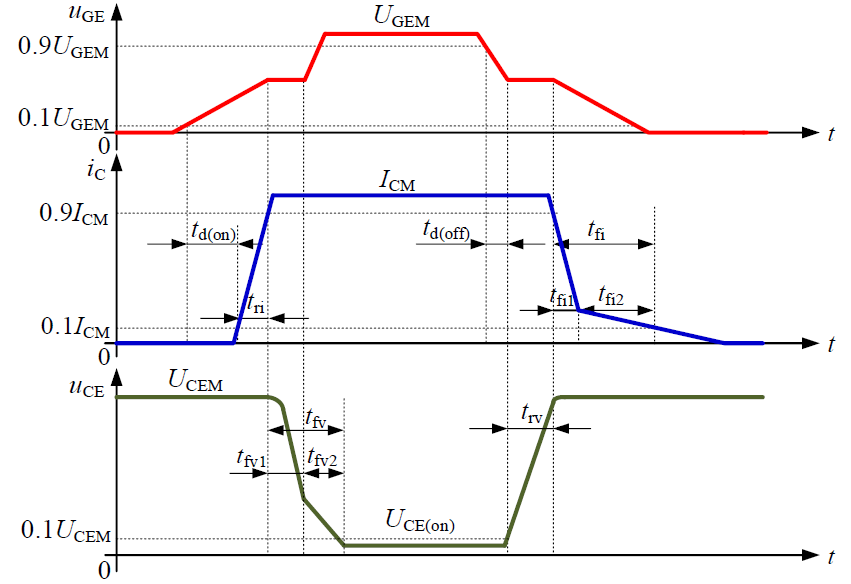
这里只介绍电流拖尾效应。
图中,$t_\mathrm{fi1}$ 对应 IGBT 内部 MOSFET 和 GTR 一起的关断过程,这段时间集电极电流 $i_\mathrm{C}$ 下降较快。$t_\mathrm{fi2}$ 对应 IGBT 内部 PNP 晶体管的关断过程,这段时间内因为 MOSFET 已经关断,晶体管无基区少子抽取通道,所以晶体管 N 基区内的少子复合缓慢,造成 $i_\mathrm{C}$ 下降较慢,这称为 IGBT 的电流拖尾现象。
本章的最后,放一个电力电子器件的对比表格:
| 器件 | 功率 | 开关速度 | 电压等级 |
|---|---|---|---|
| 电力晶体管 GTR | 中 | 中 | 中 |
| 门极可关断晶闸管 GTO | 高 | 慢 | 高 |
| 电力场效应管 MOSFET | 低 | 快 | 低 |
| 绝缘栅双极晶体管 IGBT | 中 | 中 | 高 |
第三章 前置知识
变换器的开关模式控制
各种变换器主要有两种变换模式:脉冲频率调制 (PFM) 和脉冲宽度调制 (PWM) 。PFM 通过改变开关频率来改变输出电压,而 PWM 则通过改变开关的占空比来改变输出电压。现在 PFM 很少使用,PWM 为主流的控制方式。
为了得到占空比可调的 PWM 信号,我们会设置一个锯齿波 $v_\mathrm{ST}$ (称为载波) 和控制电压 $v_\mathrm{control}$ (称为调制波),当 $v_\mathrm{control}$ 大于 $v_\mathrm{ST}$ 时,输出高电平,否则输出低电平。这样我们只需要控制 $v_\mathrm{control}$ 的大小,就可以控制输出占空比。
非正弦周期波形分析
非正弦周期波形可以通过傅里叶级数展开为一系列正弦波的叠加。对于周期为 $T$ 的非正弦周期波形 $i_\mathrm{s}(t)$,使用傅里叶级数展开,可以得到基波 $i_\mathrm{s1}$ 和高次谐波 $i_{\mathrm{s}h}$ 。
电流有效值为
畸变分量为
畸变分量有效值为
总谐波畸变率为
假如输入电压为标准正弦波,则平均功率为
功率因数为
其中,$k_\mathrm{d}=\displaystyle\frac{I_\mathrm{s1}}{I_\mathrm{s}}$ 是畸变因数,$\cos\varphi$ 是相移功率因数 DPF。
伏秒平衡与安秒平衡
伏秒平衡是指处于稳定状态的电感,在一个周期内,电压的平均值为 0.
安秒平衡是指处于稳定状态的电容,在一个周期内,电流的平均值为 0.
实际上就是电荷守恒和磁链守恒。
第四章 DC-DC 变换器
DC-DC 变换器的典型应用有:开关电源、充电器、电机驱动器等,按照输入与输出间是否有电气间隔可分为隔离型和非隔离型。
非隔离型 DC-DC 变换器按照所用的有源功率器件的个数,可以分为单管、双管和四管三类。单管 DC-DC 变换器主要有降压型 (Buck)、升压型 (Boost)、降升压型 (Buck-Boost)、Cuk 变换器、Zeta 变换器和 Sepic 变换器。
单管隔离型 DC-DC 变换器主要有正激式 (Forward)、反激式 (Flyback) 两种。双管隔离型 DC-DC 变换器主要有双管正激、双管反激、推挽式、半桥式四种。
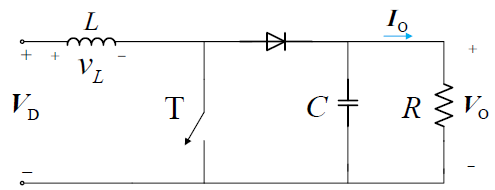
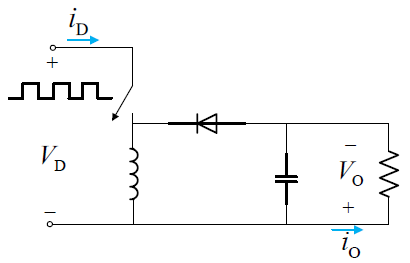
降压式变换器
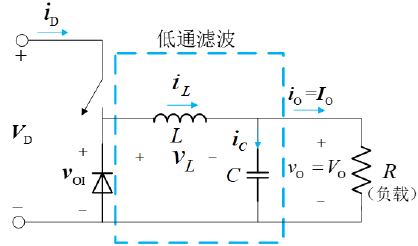
Buck 变换器有两种工作模式,即连续导通模式 (CCM) 和断续导通模式 (DCM)。这两种工作方式之间有一个边界,称为临界导通模式。这里只介绍连续导通模式。
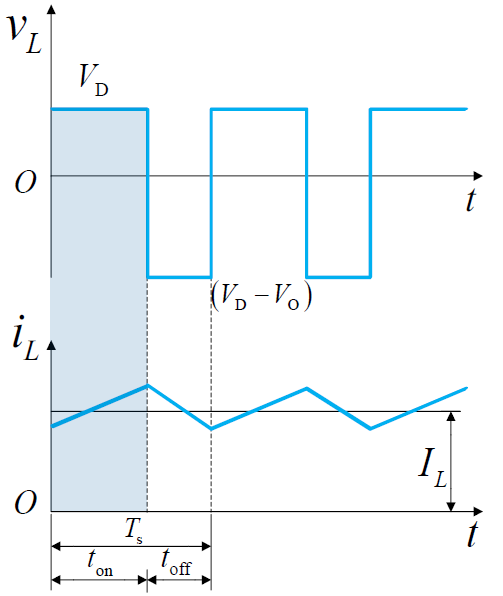
连续导通模式分析
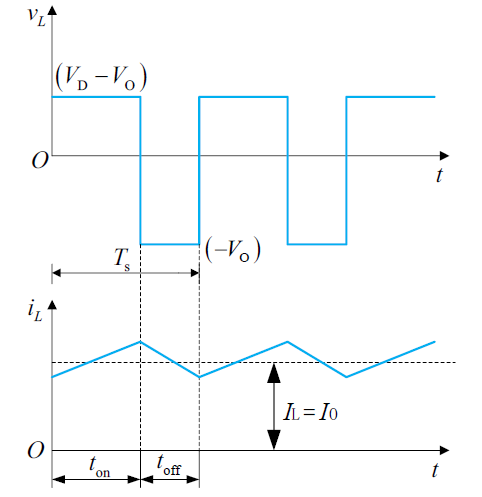
在分析时,由于电容的作用,输出电压 $V_\mathrm{O}$ 可以看做是一个常数。
开关导通时,电感充电,电感电流成线性上升
当 $t=t_\mathrm{on}$ 时,电感电流达到最大值 $i_\mathrm{L, peak}$。
开关关断时,电感通过二极管放电,电感电流成线性下降
由伏秒平衡可以得到
化简得到
如果忽略功率损耗,则有
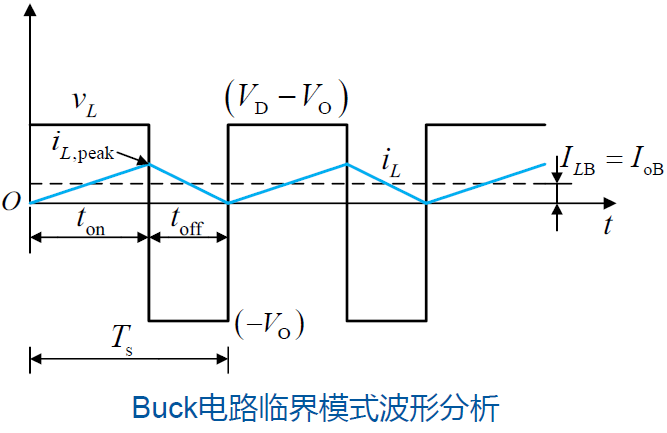
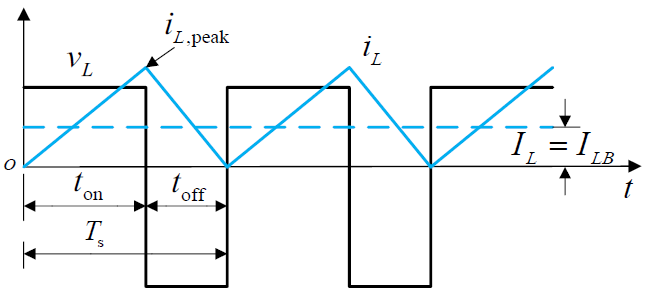
在临界模式下,电感电流平均值为
如果输入电压为常数,则有
$D$ 为变量,可以求出抛物线最大值。
如果输出电压为常数,则有
在给定的 $D$ 下,如果输出电流平均值大于等于 $I_\mathrm{LB}$,则工作在连续导通模式;如果小于 $I_\mathrm{LB}$,则工作在断续导通模式。
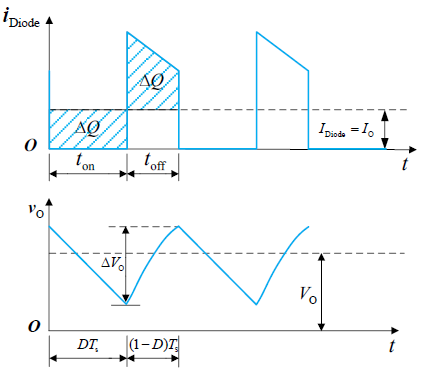
输出电压纹波脉动分析
实际上,当电容有限时,输出电流和电压都有纹波。为了定量计算输出电压的纹波成分,我们假设负载电流为定值,此时电感电流的平均值与之相等。当电感电流大于平均值时,电容充电,反之放电。
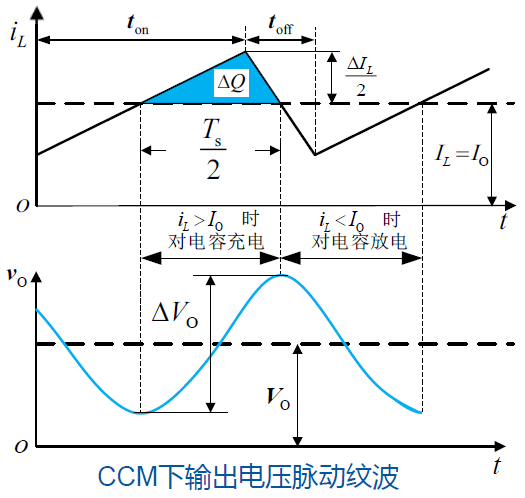
电容在一个开关周期内的充电电荷为
在上面,我们已经推导了 $\Delta I_\mathrm{L}=\displaystyle\frac{V_\mathrm{O}}{L}(1-D)T_\mathrm{s}$,则脉动电压为
纹波率为
其中,$f_\mathrm{c}=\displaystyle\frac{1}{2\pi \sqrt{LC}}$
升压式变换器
同样,Boost 变换器也有两种工作模式。这里只介绍连续导通模式。
连续导通模式分析
在分析时,由于电容的作用,输出电压 $V_\mathrm{O}$ 可以看做是一个常数。
开关导通时,电感充电,电感电流成线性上升
当 $t=t_\mathrm{on}$ 时,电感电流达到最大值 $i_\mathrm{L, peak}$。
开关关断时,电感通过二极管放电,电感电流成线性下降
由伏秒平衡可以得到
化简得到
如果忽略功率损耗,则有
在临界模式下,电感电流平均值为
电感的平均电流与输入平均电流相等,则输出电流满足
同样,可以用不等式求出输入电流平均值或输出电流平均值最大值。
在给定的 $D$ 下,如果输出电流平均值大于等于 $I_\mathrm{OB}$,则工作在连续导通模式;如果小于 $I_\mathrm{OB}$,则工作在断续导通模式。
输出电压纹波脉动分析
以连续导通模式为例,输出电压纹波脉动分析与降压式变换器类似。这里我们假设在 $t_\mathrm{off}$ 末端时,二极管电流仍然大于输出平均电流 $I_\mathrm{O}$ ,否则计算会变得比较复杂。
在一个周期内,电容的充电电荷为
纹波电压为
假如为纯阻性负载,则有
纹波率为
如果 $\tau$ 比较大,那么可以忽略纹波。
升降压变换器
升降压变换器的分析与前文并无什么不同,这里只给出结论。
注意,升降压变换器的输出电压 $V_\mathrm{O}$ 的极性与输入电压 $V_\mathrm{D}$ 的极性相反。
用伏秒平衡可以得到
输入电流、输出电流和电感电流平均值之间的关系为
用这个关系去算临界模式导通即可。
纹波分析与 Boost 变换器完全一致(实际上从输出端看就是个 Boost 变换器)。
纹波电压
纹波率
Cuk, Sepic 和 Zeta 变换器
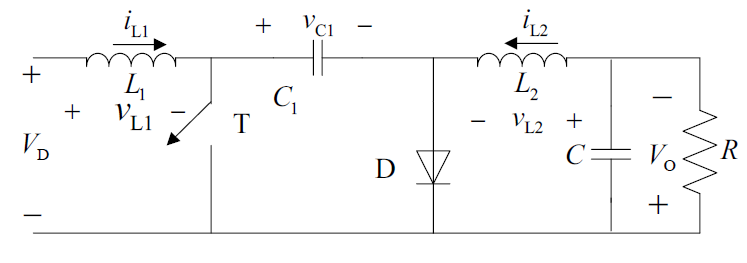
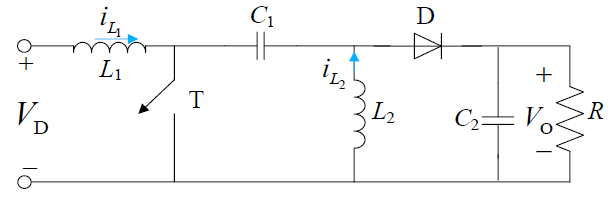
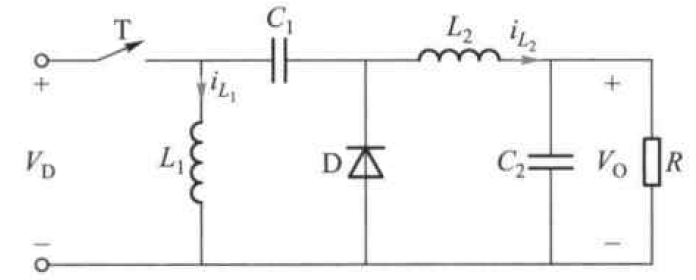
这里面只有 Cuk 变换器的输出电压极性与输入电压相反。
单端正激变换器
Forward 变换器是在 Buck 变换器的续流二极管前增加了一个变压器,再增加一个整流二极管组成的。
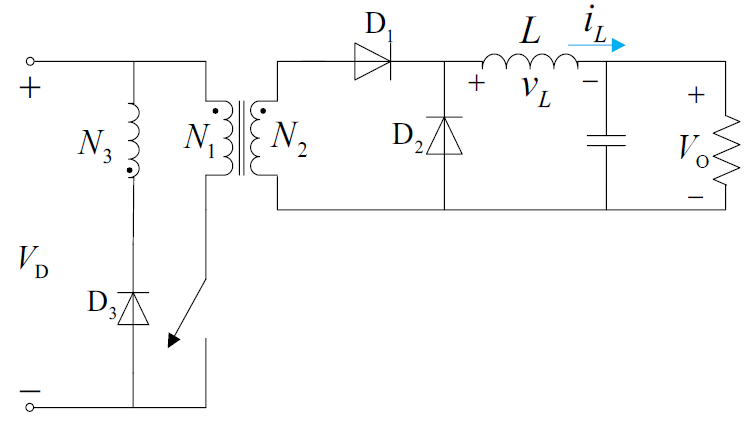
正激的含义:隔离变压器初级线圈连接的 MOS 管在导通时,变压器次级形成整流过程,在 MOS 管关断时进行磁复位。
正激变换器有如下特点:
- 变压器同名端在同一位置
- 需要磁复位
- 需要整流二极管
- 输出电压极性与输入电压相同
如果不进行磁复位,那么变压器一次侧的磁链会不断增大直到饱和,导致无法输出电压。
输入电压与输出电压之间的关系为
单端反激变换器
Flyback 变换器是由 Buck-Boost 变换器插入变压器演化出来的。
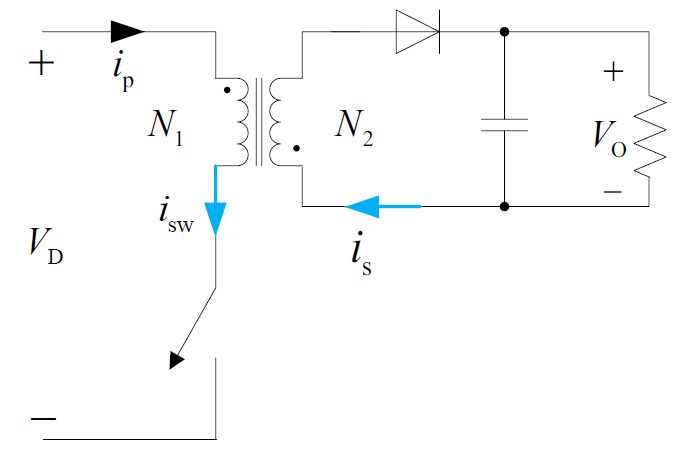
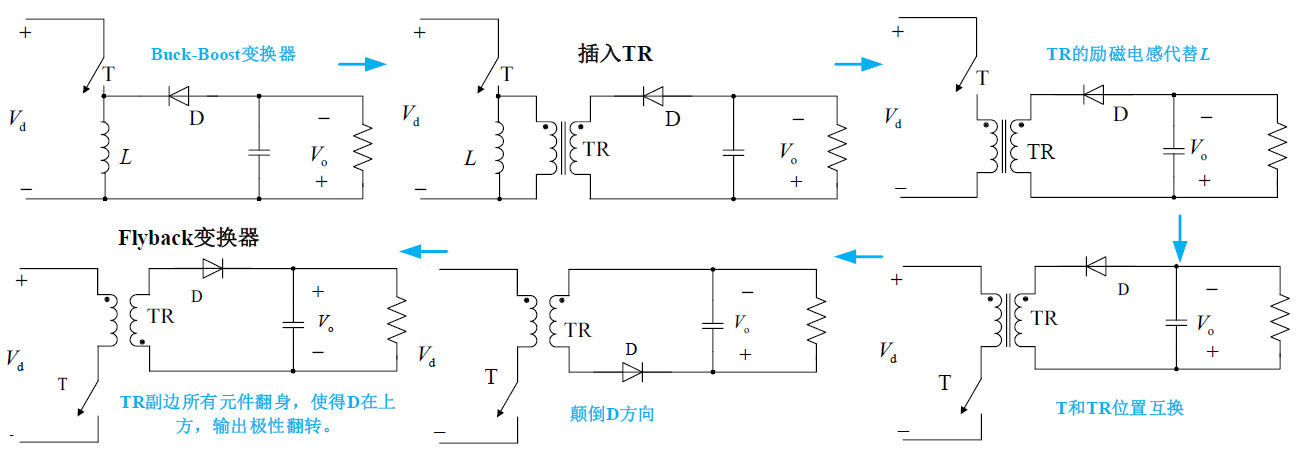
反激的含义:隔离变压器初级线圈连接的 MOS 管在关断时,变压器次级形成整流过程,同时进行磁复位。
反激变换器有如下特点:
- 变压器同名端在不同位置
- 不需要磁复位,但需要留出气隙防止饱和
- 需要假负载给电容放电
- 输出电压极性与输入电压相同
- 效率比正激变换器低
输入电压与输出电压之间的关系为
推挽变换器
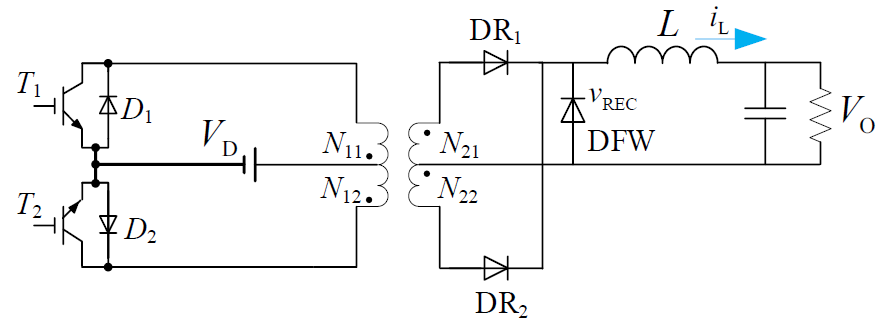
推挽变换器主要用于低电压高电流的场景。
输入电压与输出电压之间的关系为
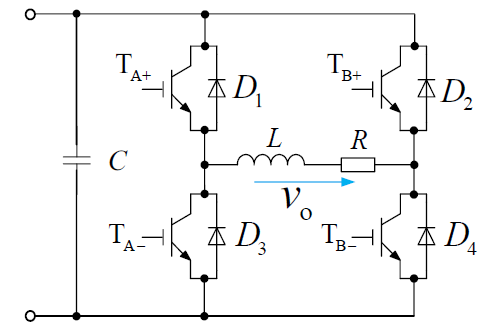
第五章 DC-AC 变换器
我们经常按照直流侧储能元件的性质将逆变器分为电压型逆变器 (VSI) 和 电流型逆变器 (CSI)。电压型逆变器的直流侧储能元件为电容,电流型逆变器的直流侧储能元件为电感。VSI 是本章的重点讨论对象。
SPWM 正弦波脉冲宽度调制
SPWM 是用一系列脉宽按照正弦规律变换的脉冲来模拟正弦波。
冲量等效原理
当面积相等而形状不同的短脉冲作用于同一个惯性环节时,其响应基本相同。
SPWM 的工作原理
先引入两个重要的物理量:
调制比 (Amplitude Modulation Ratio, AMR):
其中,$\overline{V}_\mathrm{control}$ 是调制波的幅值,$\overline{V}_\mathrm{tri}$ 是载波的幅值。
载波比 (Frequency Modulation Ratio, FMR):
其中,$f_\mathrm{tri}$ 是载波频率,$f_1$ 是期望输出的正弦波频率。
以单桥臂双极性控制为例,输出电压的基波成分为
逆变器的电压增益都等于调制比乘以桥臂电压差,即 $m_\mathrm{a}V$ 。其中,电压差由拓扑决定。
上式只在 $m_\mathrm{a} \leq 1$ 时成立。我们称 $m_\mathrm{a} \leq 1$ 时为线性调制,$m_\mathrm{a} > 1$ 时为过调制。
为了消除偶次谐波,在双极性调制中,我们需要控制 $m_\mathrm{f}$ 为奇数。
同步调制与异步调制
同步调制是指调制波频率变化时,载波频率相应地变化,从而保持载波比 $m_\mathrm{f}$ 不变。
异步调制是指调制波频率变化时,载波频率不变。
同步调制可以有效抑制谐波含量,但是控制相对复杂。为此我们可以使用分段同步调制,将输出频率划分为几个频段,仅保持各个频段内载波比 $m_\mathrm{f}$ 不变。但我们大多还是使用异步调制。
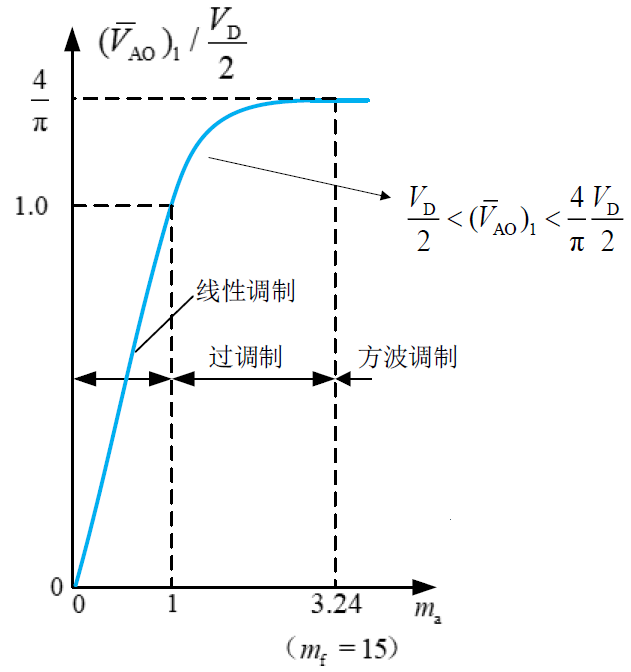
过调制与方波调制
过调制是指调制比 $m_\mathrm{a} > 1$ 的情况,此时输出电压谐波含量更大,一般用于电机驱动中。
如果 $\overline{V}_\mathrm{control} \gg \overline{V}_\mathrm{tri}$ ,则输出电压近似为方波,此时称为方波调制。
具体实现
计算脉宽有两种方法
自然采样法
规则采样法
单相逆变器
主要使用单相全桥逆变器,包含三种调制方式。我们只需要记得不同调制方式下,载波比 $m_\mathrm{f}$ 的取值与偶次谐波的抑制关系即可。
| 调制方式 | 载波比 $m_\mathrm{f}$ | 最低次谐波位置 |
|---|---|---|
| 双极性调制 | $m_\mathrm{f}$ 取奇数 | $m_\mathrm{f}$ 附近(含) |
| 单极性调制 | $m_\mathrm{f}$ 取偶数 | $m_\mathrm{f}$ 附近(不含) |
| 单极性倍频调制 | $m_\mathrm{f}$ 任意 | $2m_\mathrm{f}$ 附近(不含) |
同样,过调制和方波调制的幅值也为 1 倍和 $\displaystyle\frac{4}{\pi}$ 倍。
三相逆变器
每一个桥臂与单相逆变器分析完全相同。但是由于每一相相差 $120^\circ$ ,所以其线电压线性调制的最大值只有 $\displaystyle\frac{\sqrt{3}}{2}\approx 0.866$ 倍,方波调制的最大值为 1.1 倍。
SVPWM 空间矢量脉宽调制
对一个三相逆变器,每一组桥臂都有上开下关和下开上关两种状态,分别记为 1 和 0。这样就有 $2^3=8$ 种状态,其中 000 和 111 两种状态为空矢量。我们可以将这 8 种状态看做不同的空间矢量,称为空间矢量脉宽调制 (SVPWM)。
通常我们使用 7 段对称调制法,步骤如下:
- 计算出期望输出电压的空间矢量 $V_\mathrm{d}$ 的幅值和相位角,确定扇区
- 将 $V_\mathrm{d}$ 分解为两个相邻的矢量 $V_\mathrm{a}$ 和 $V_\mathrm{b}$ 的线性组合
- 计算 $V_\mathrm{a}$ 和 $V_\mathrm{b}$ 的占空比,确定矢量控制时间 $t_\mathrm{a}$ 和 $t_\mathrm{b}$
- 计算零矢量的占空比,确定零矢量控制时间 $t_0$
- 在一个周期内,两侧和中间分别为零矢量 000 和 111,时间为 $\frac{t_0}{4}$;中间为非零矢量开启时间,时间分别为 $\frac{t_\mathrm{a}}{2}$ 和 $\frac{t_\mathrm{b}}{2}$
当然,在上述调制方式外,也有一些其他的调制方法,如选择性谐波消除控制、三次谐波注入控制、滞环电流控制等。
第六章 AC-DC 变换器
本章介绍各种整流电路。我们将会从单相整流电路开始,逐步扩展到三相整流电路;从最简单的阻性负载到复杂的感性、容性负载一步步分析。对于不控整流电路,可以看做是晶闸管整流电路导通角为 0 的特殊情况。
单相半波可控整流电路
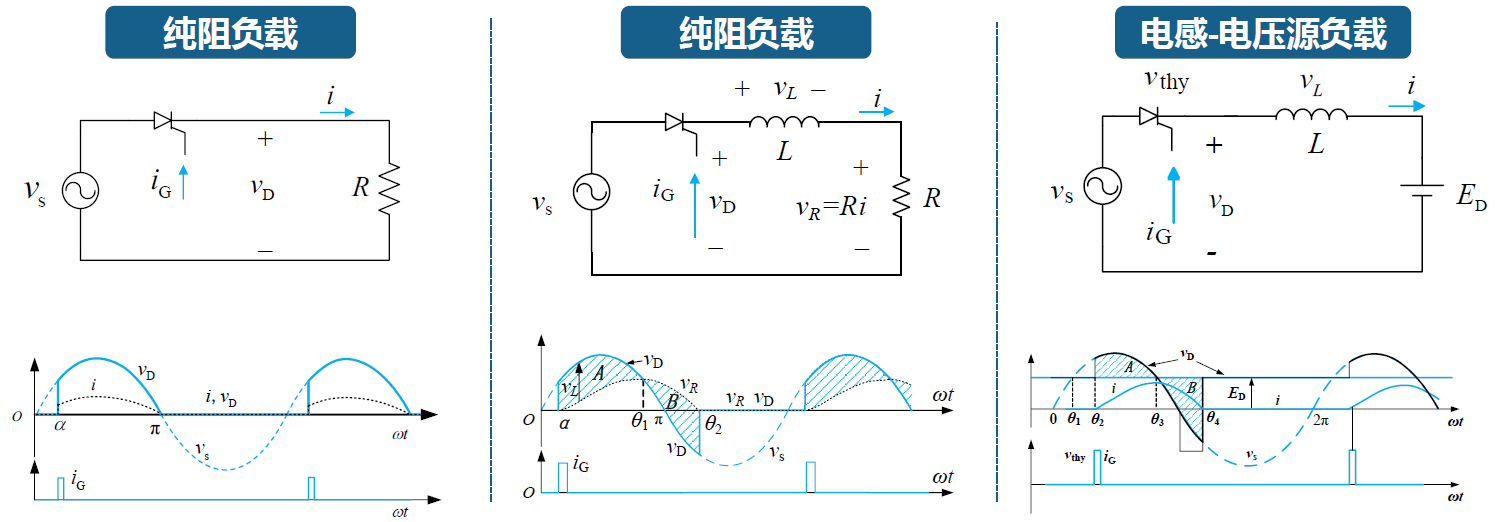
阻性负载
如上图所示,晶闸管的导通角 $\alpha$ 可以通过门极电流来控制。假设晶闸管的导通角为 $\alpha$,则输出电压为
单相半波可控整流电路的一个积分周期为 $2\pi$ ,移相范围为 $[0, 180^\circ]$ 。注意,单相逆变器的控制角是从电压 0 点开始计算的,即 $0^\circ$ 。
三相半波可控整流电路
阻性负载
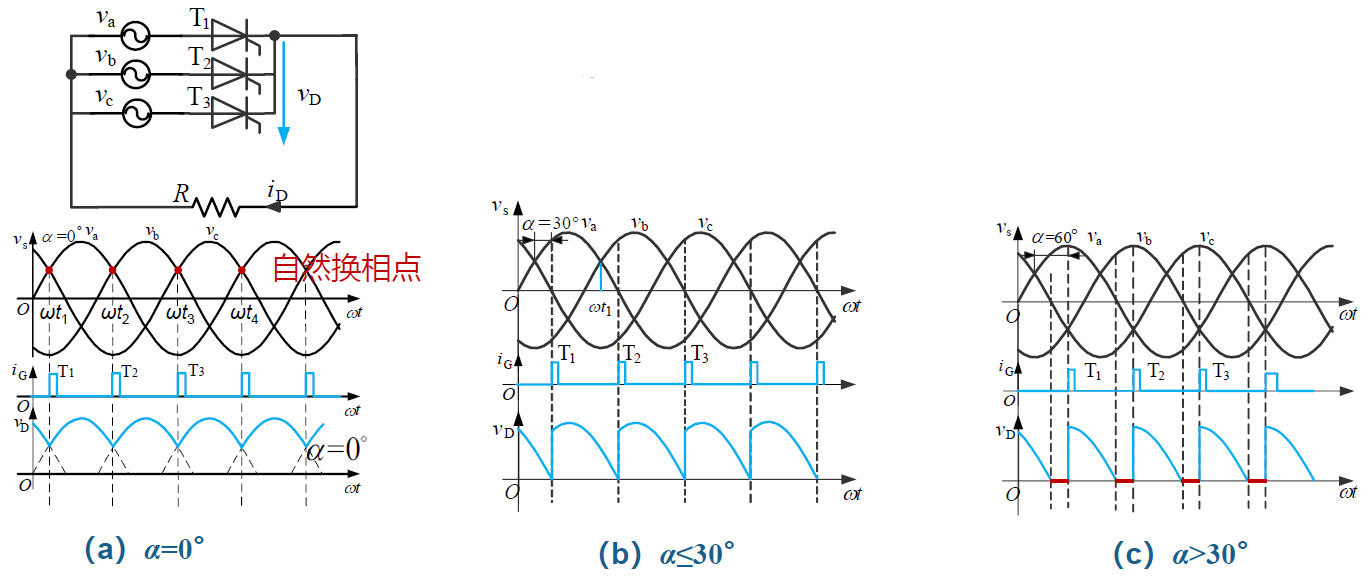
在 $\alpha \le 30^\circ$ 时,负载电流连续,输出电压平均值为
在 $\alpha > 30^\circ$ 时,负载电流不连续,输出电压平均值为
阻感负载
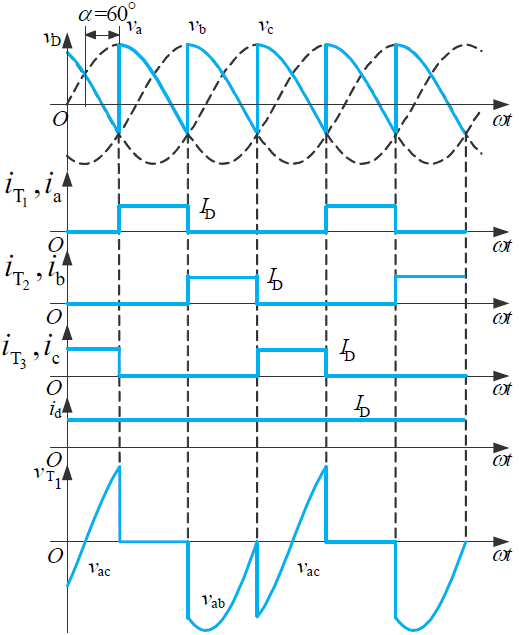
在有电感且电感足够大的情况下,电流一定会连续。这种情况我们都可以把负载看成一个电流源。因此电压平均值的计算公式与阻性负载在 $\alpha \le 30^\circ$ 时相同,即
反电动势负载
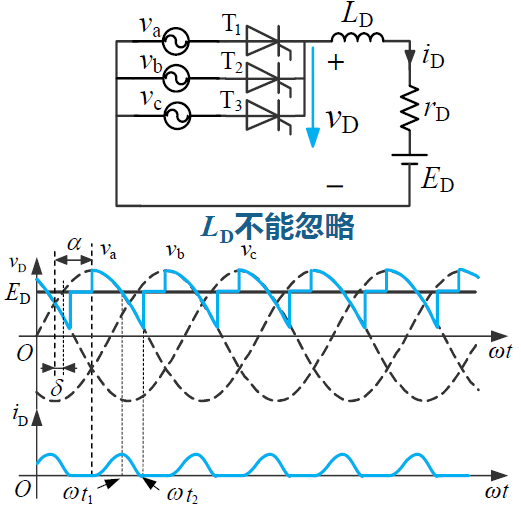
图中为电感比较小的情况,这时需要用伏秒平衡去分析。但是一般我们认为电感比较大,即电流连续,所以输出电压平均值仍与连续是一致,即
平均电流为
三相半波可控整流电路触发角为 0 的点为相电压的自然换相点,此时 $\alpha=30^\circ$ ,这与单相时是不一致的。此外,三相半波可控整流电路的一个积分周期为 $\frac{2\pi}{3}$ ,阻性负载移相范围为 $[0, 150^\circ]$,阻感负载移相范围为 $[0, 90^\circ]$ 。
单相桥式可控整流电路
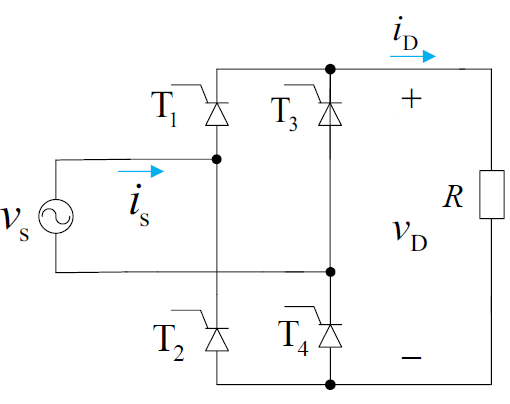
阻性负载
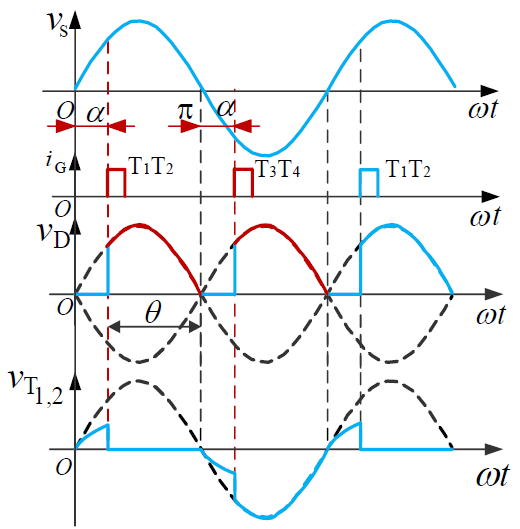
阻感负载
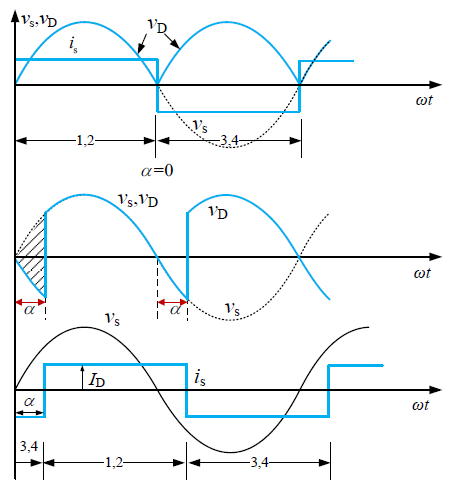
在有电感且电感足够大的情况下,电流连续,输出电压平均值为
在不考虑换流过程的情况下,相移功率因数为 $\cos\alpha$ ,畸变因数为 0.9 。
单相桥式可控整流电路的一个积分周期为 $\pi$ ,阻性负载移相范围为 $[0, 180^\circ]$ ,阻感负载移相范围为 $[0, 90^\circ]$。单相逆变器的控制角是从电压 0 点开始计算的,即 $0^\circ$ 。
注意,考试可能有坑。题目会把下桥臂的两个晶闸管换成二极管,变成半控电路。此时要当做阻性负载来看;或者会在阻感负载上并联一个续流二极管,此时也要当做阻性负载来看。
考虑输入电感时的阻感负载
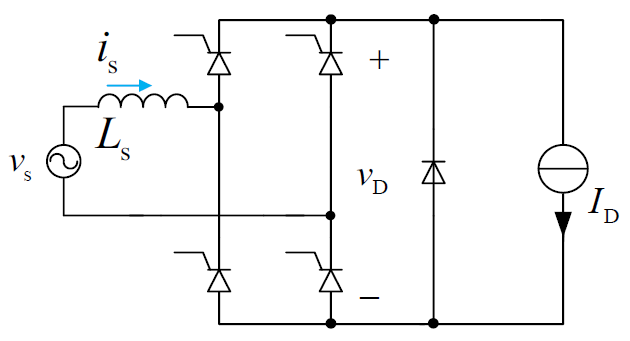
由于存在输入电感,换流过程不再是瞬间完成,这段时间称为换流时间,对应的角度称为换相重叠角,用字母 $u$ 表示。
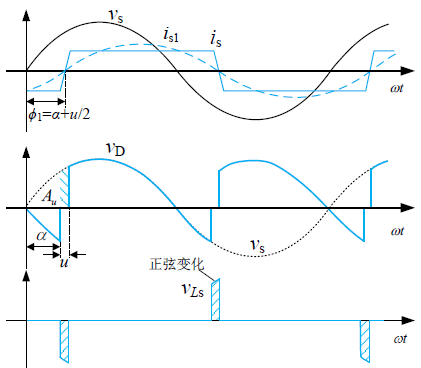
换流时,用积分计算电压损失面积 $A_u$
化简得到
因此,输出电压平均值为
换相重叠角
相移功率因数
根据输入输出功率平衡 $V_\mathrm{s}I_\mathrm{s1}DPF=V_\mathrm{D}I_\mathrm{D}$ ,可以得到基波输入电流有效值
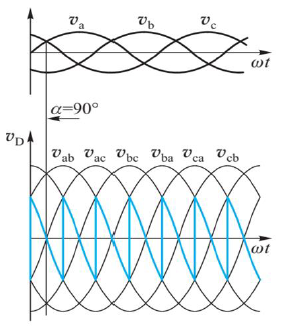
逆变模式
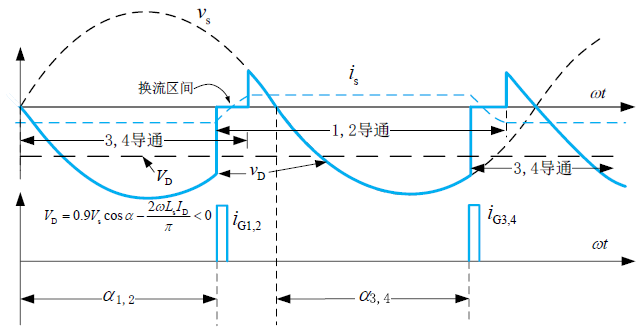
逆变模式需要满足以下条件:
- 电动势 $E_\mathrm{D}$ 反向
- 导通角满足 $90^\circ < \alpha < 180^\circ$
- $|E_\mathrm{D}| > |V_\mathrm{D}|$
定义熄灭角
逆变角
则有
熄灭时间必须要大于晶闸管关断时间,折算成角度 $\theta$ 约为 $5^\circ$ ,再加上一个安全裕量角 $\varphi$ ,则有
即
启动时,要在满足逆变角最小值的情况下,尽量增大导通角 $\alpha$ 使得电流断续。
三相桥式可控整流电路
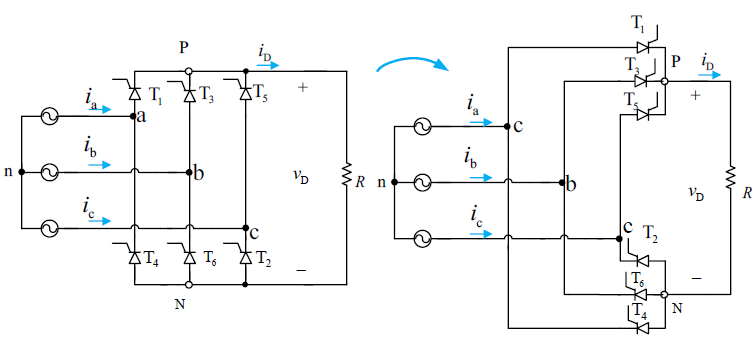
阻性负载
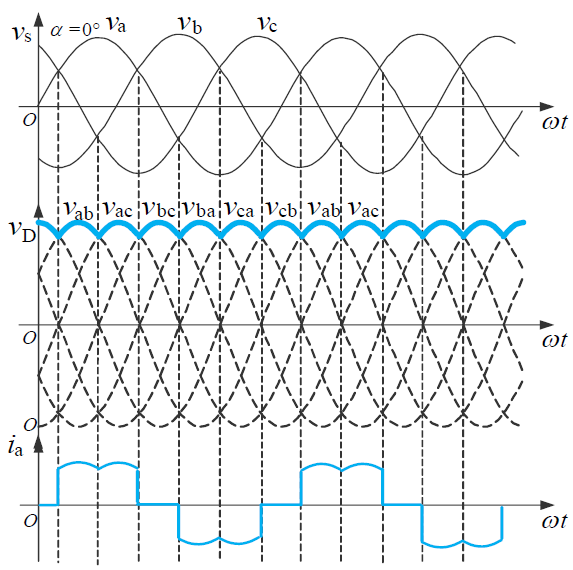
在 $\alpha \le 60^\circ$ 时,负载电流连续,输出电压平均值为
在 $\alpha > 60^\circ$ 时,负载电流不连续,输出电压平均值为
阻感负载
在有电感且电感足够大的情况下,电流连续,输出电压平均值为
三相桥式可控整流电路的一个积分周期为 $\frac{\pi}{3}$ ,阻性负载移相范围为 $[0, 120^\circ]$ ,阻感负载移相范围为 $[0, 90^\circ]$。注意,三相全桥逆变器的控制角是从线电压的自然换相点开始计算的,即 $60^\circ$ 。
考虑输入电感时的阻感负载
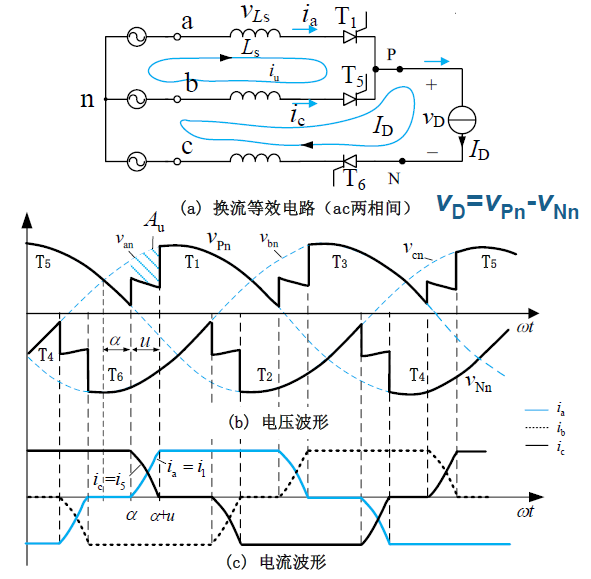
对图中上网孔列网孔方程,得出电压损失为 $\frac{v_\mathrm{ac}}{2}$,则电压损失面积为
化简得到
因此,输出电压平均值为
换相重叠角
相移功率因数
最后,总结一下平均电压、换相压降和换相重叠角的公式:
| 电路形式 | 电流连续分界导通角 | 电流连续时平均电压 | 电流断续时平均电压 | 换相压降 $A_u$ | 换相重叠角$\cos\alpha-\cos(\alpha+u)$ | 积分周期 |
|---|---|---|---|---|---|---|
| 单相半波 $m=2$ | $0.45V_\mathrm{s}\frac{1+\cos\alpha}{2}$ | $2\pi$ | ||||
| 三相半波 $m=3$ | $30^\circ$ | $1.17V_\mathrm{s}\cos\alpha$ | $0.675V_\mathrm{s}\left[1+\cos\left(\frac{\pi}{6}+\alpha\right)\right]$ | $\frac{3\omega L_\mathrm{s}I_\mathrm{D}}{2\pi}$ | $\frac{2\omega L_\mathrm{s}I_\mathrm{D}}{\sqrt{6}V_\mathrm{s}}$ | $\frac{2\pi}{3}$ |
| 单相桥式 $m=2$ | $0.9V_\mathrm{s}\cos\alpha$ | $0.9V_\mathrm{s}\frac{1+\cos\alpha}{2}$ | $\frac{2\omega L_\mathrm{s}I_\mathrm{D}}{\pi}$ | $\frac{2\omega L_\mathrm{s}I_\mathrm{D}}{\sqrt{2}V_\mathrm{s}}$ | $\pi$ | |
| 三相桥式 $m=6$ | $60^\circ$ | $1.35V_\mathrm{LL}\cos\alpha$ | $1.35V_\mathrm{LL}\left[1+\cos\left(\frac{\pi}{3}+\alpha\right)\right]$ | $\frac{3\omega L_\mathrm{s}I_\mathrm{D}}{\pi}$ | $\frac{2\omega L_\mathrm{s}I_\mathrm{D}}{\sqrt{2}V_\mathrm{LL}}$ | $\frac{\pi}{3}$ |