电力系统暂态分析
第一章 线路暂态
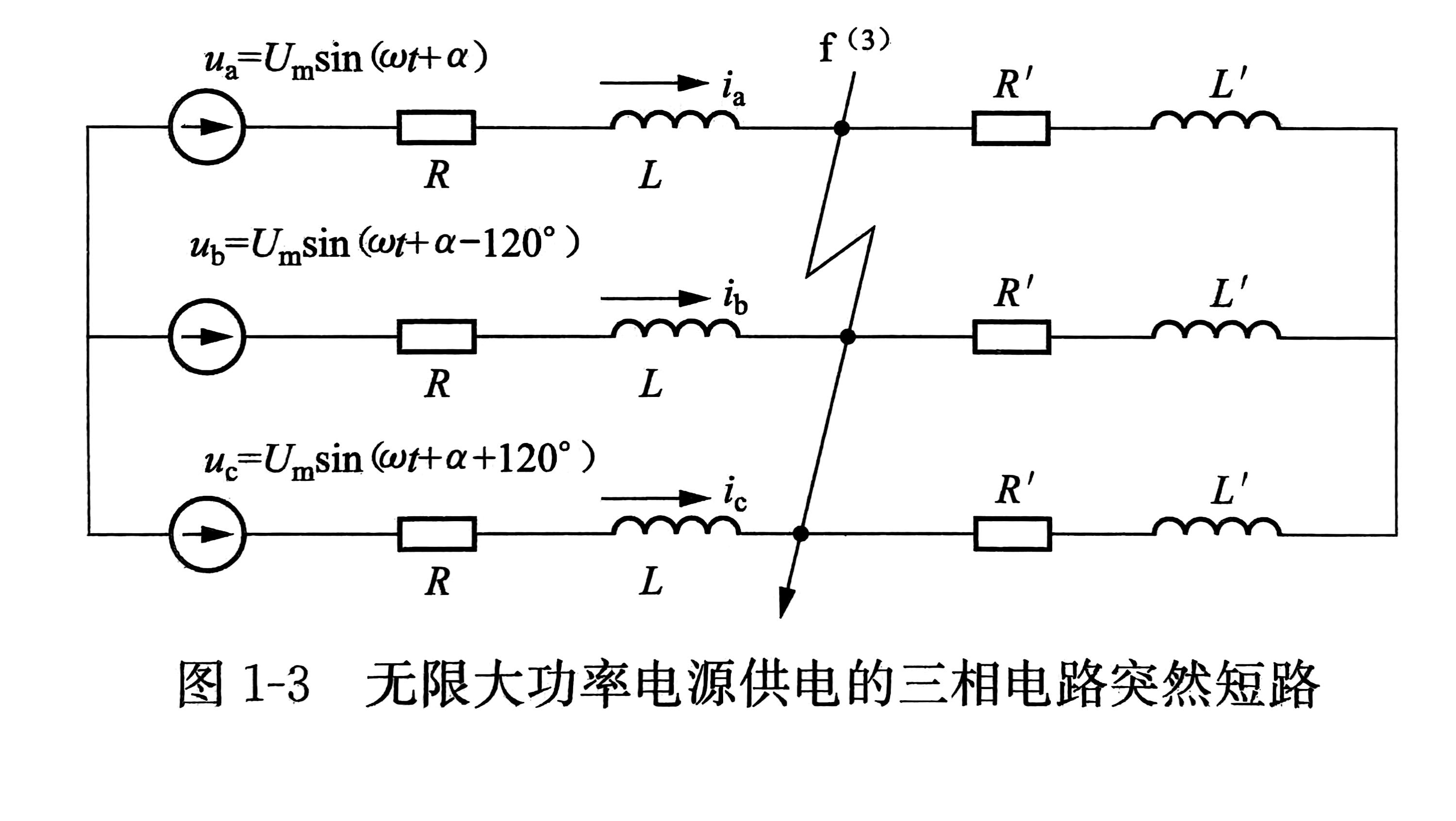
无限大功率电源供电的三相短路电流分析
当电源功率为无穷大时,电源的电压和频率保持恒定,且发电机内阻抗为零。
在这种情况下,短路电流可以使用三要素法计算
其中,$I_\mathrm{m}$ 为稳态短路电流的幅值,$I_\mathrm{m\left|0\right|}$ 为短路前电流的幅值,$\alpha$ 为短路发生时的相位角,$\varphi=\arctan\frac{\omega L}{R}$ 为短路后的阻抗角,$\varphi_{\left|0\right|}=\arctan\frac{\omega (L+L’)}{R+R’}$ 为短路前的阻抗角,$T_\mathrm{a}=\frac{L}{R}$ 为三相短路的时间常数。
三相短路最严重的情况是:在空载条件下短路角满足 $\left|\alpha-\varphi\right|=90^\circ$ ,此时直流分量起始值最大。
短路冲击电流
将 $I_\mathrm{m\left|0\right|}=0$ ,$\varphi=90^\circ$ ,$\alpha=0$ 代入短路电流公式有
上式约在 $t=0.01\mathrm{s}$ 时达到最大值,由此可得冲击电流值为
$K_\mathrm{M}$ 根据情况选择 1.8 或 1.9 。
短路电流最大有效值
对短路电流第一个周期积分即可,这里直接给出结果
当 $K_\mathrm{M}=1.8$ 时,$I_\mathrm{M}\approx 1.52\frac{I_\mathrm{m}}{\sqrt{2}}$;当 $K_\mathrm{M}=1.9$ 时,$I_\mathrm{M}\approx 1.62\frac{I_\mathrm{m}}{\sqrt{2}}$。
第二章 机电暂态
机电暂态的产生原因是磁链守恒。在短路时,电流突然变化,但是磁链不能立即变化,因此会阻碍电流的变化。
同步电机稳态运行情况
在此后的讨论中,我们将对同步电机做出以下假设:
- 同步电机是理想电机
- 只考虑电磁暂态过程,不考虑线路暂态过程
- 忽略磁路饱和的影响
- 短路后不考虑强励,励磁电压不变
正方向定义
转子逆时针旋转为正方向,q 轴超前 d 轴 $90^\circ$ 。选定定子各绕组轴线(即图中 a, b, c 轴)作为各相绕组磁链的正方向。定子电流产生负磁通,转子电流产生正磁通。这样运行时,发电机处于过励状态,电枢反应是去磁的。
同步电机电压平衡关系
其实这一部分电机学已经学过,这里只补充一些内容。
发电机端电压 $u_\mathrm{q}$ 、 $u_\mathrm{d}$ 满足
或写成相量形式
其中,$x_\mathrm{d}=x_\mathrm{ad}+x_\mathrm{\sigma}$ 称为直轴同步电抗,是由直轴电枢反应电抗和漏电抗组成的。同理,$x_\mathrm{q}=x_\mathrm{aq}+x_\mathrm{\sigma}$ 称为交轴同步电抗。
对于励磁绕组,磁链路径与直轴相同,励磁电抗满足 $x_\mathrm{f}=x_\mathrm{ad}+x_\mathrm{f\sigma}$ 。
在暂态分析中,我们一概不考虑同步电机的机端电阻。
对于隐极机,电压平衡方程为
对于凸极机,电压平衡方程为
其中,$\dot{E}_\mathrm{Q}$ 为虚拟电动势,用于确定交轴的位置。
同步电机电抗参数和电动势平衡方程
正常运行
励磁电抗也加了直轴电枢反应电抗,是因为二者磁路是一致的。
暂态参数(忽略阻尼绕组)
q 轴暂态电抗 $x_\mathrm{q}’$ 与稳态相同,因为 q 轴电抗不受励磁绕组的影响。
次暂态参数(考虑阻尼绕组)
短路电流基频交流分量的初始值和稳态有效值
稳态值
q 轴分量为 0 (只有电抗),d 轴分量为
暂态和次暂态初始值
Park 变换
Park 变换是将三相交流电压或电流转换为直流电压或电流的变换方法。复杂的交变电感应可以通过 Park 变换简化。
Park 矩阵为
其逆矩阵为
经过 Park 变换后,我们可以得到同步电机电压方程和磁链方程
这两个矩阵就是同步电机基本方程。
全电流各分量时间常数
忽略阻尼绕组
第一个式子很容易理解,这就是励磁回路的时间常数。
第二个式子可以画出等效电路,其决定了定子中基频暂态分量的衰减。
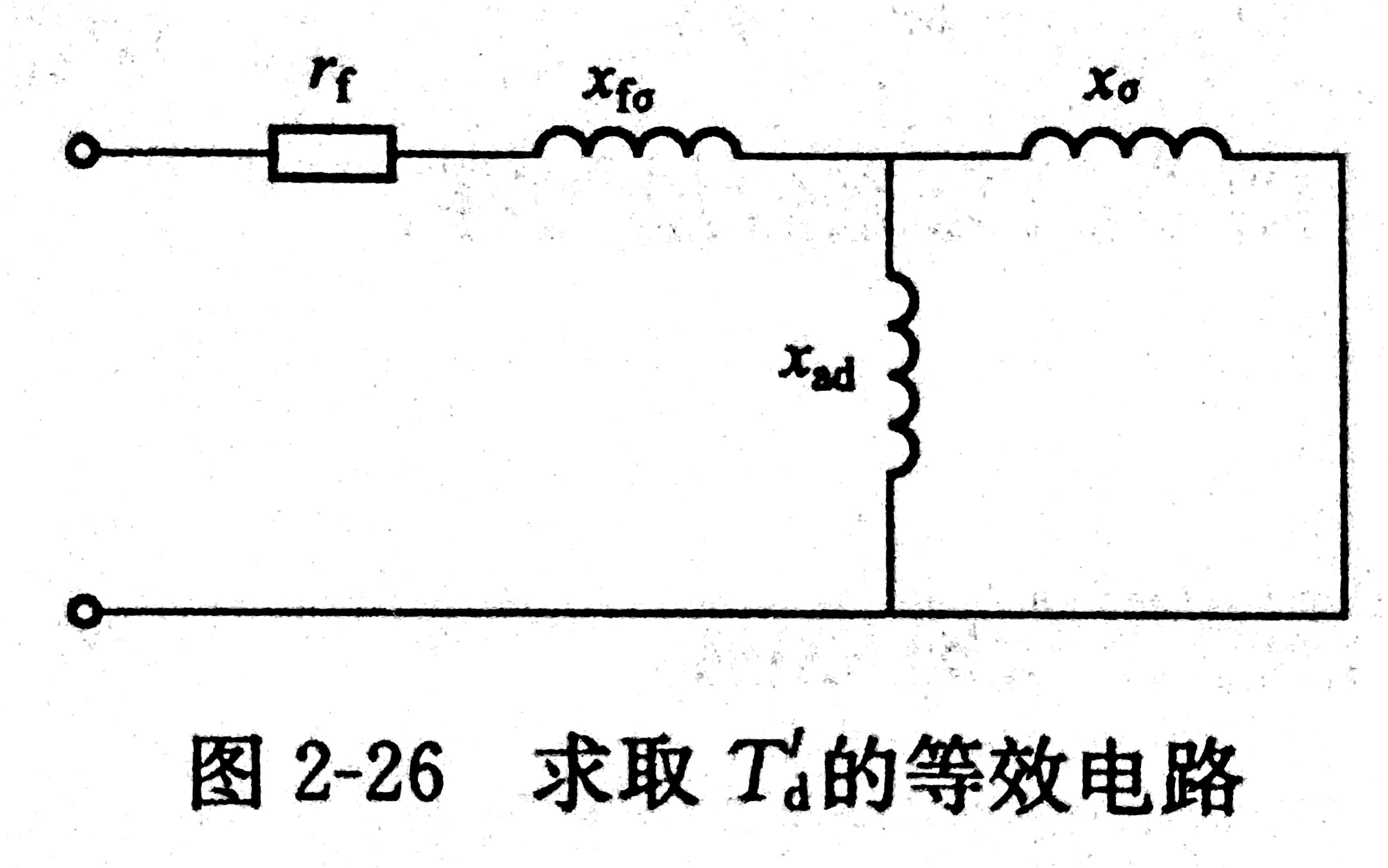
第三个式子是定子回路的时间常数,决定了转子中基频暂态分量和定子中倍频分量的衰减。
考虑阻尼绕组
电流分量对应关系
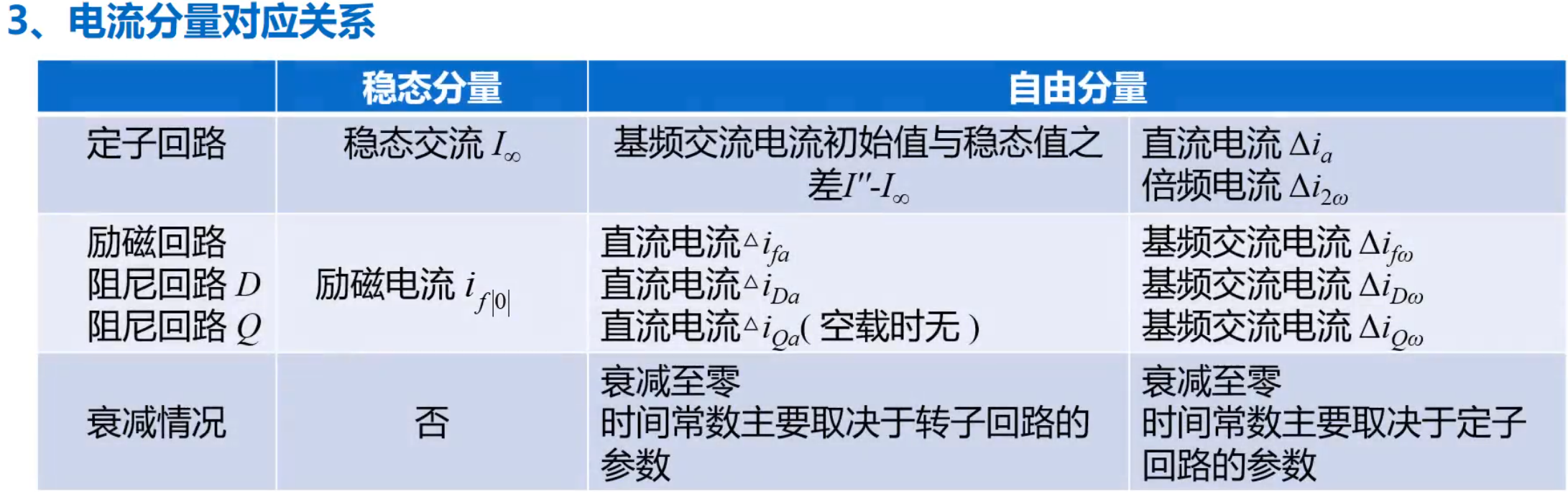
直流分量的衰减决定了其他交流分量的衰减。
电动势的产生
稳态交轴电动势
从同步电机基本方程中,我们可以得到
暂态交轴电动势
次暂态交轴电动势和直轴电动势
所以,当题目问你,哪些电动势在短路时会突变,我们就可以知道:正比于电流的会突变,正比于磁链的不会突变。
第三章 电机转子运动方程和机电特性
转子运动方程
根据转动力学,转子的机械角速度与转矩有如下关系
其中,$M_\mathrm{T}$ 为转子机械转矩,$M_\mathrm{E}$ 为电磁转矩,$J$ 为转动惯量。
在额定转速下,转子的动能为
代入转子运动方程,得到
采用标幺制,两边同时除以转矩基准值 $ M_\mathrm{B}=\displaystyle\frac{S_\mathrm{B}}{\Omega_0}$ ,得到
记惯性时间常数 $T_\mathrm{J}=\displaystyle\frac{2W_\mathrm{k}}{S_\mathrm{B}}$ ,则有
在正常工作状态下,机械角速度近似为额定转速,即 $ \Omega_* \approx 1$ ,因此转矩的标幺值等于功率的标幺值,则有
惯性时间常数的物理意义为,在转子上加上额定转矩,转子从静止状态匀加速到额定转速所需的时间。也可以改写为
其中,$GD$ 为转子飞轮矩($\mathrm{t}\cdot \mathrm{m}^2$ ,这与电机控制技术的飞轮矩不一样!),$n$ 为转速(rpm),$S_\mathrm{B}$ 为额定容量(MVA)。
功角与电角速度之间有
这样,我们就得到了转子运动方程的完整形式
同步电机机电特性
在稳态条件下,电磁功率满足
电动势满足
将电动势代入电磁功率公式,得到
如果是隐极机,$ x_\mathrm{d\Sigma}=x_\mathrm{q\Sigma} $,就没有第二项。
同样,我们也可以用暂态电动势和暂态电抗表示电磁功率,推导过程一致,得
但是后面带的一项会影响计算,所以我们会用 $x_\mathrm{d}’$ 后电动势 $E’$ 来表示电磁功率
其中,$\delta’$ 为 $E’$ 和 $U$ 的相位差。
也可以用机端电压表示电磁功率
由 $E_\mathrm{q}$, $E’$ 和 $U_\mathrm{G}$ 与系统之间的联系电抗满足 $x_\mathrm{d\Sigma} > x_\mathrm{d\Sigma}’ > x_\mathrm{e}$ ,因此它们的功率极限由小到大。
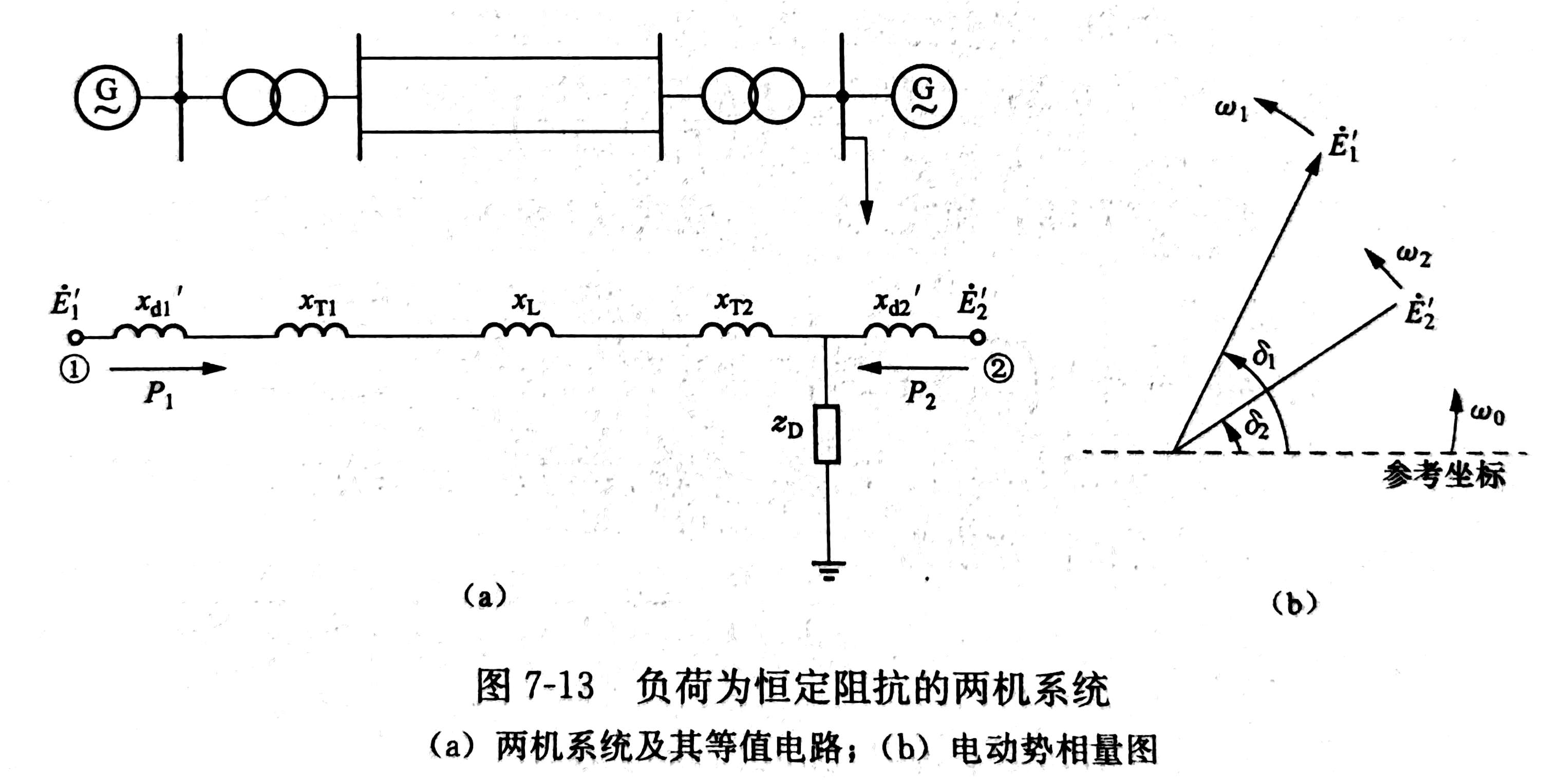
两机系统电磁功率
直接上公式
其中,$\beta_{12}=\arctan\frac{G_{12}}{B_{12}}$ 。
第四章 电力系统小干扰分析
平衡的充要条件与静态稳定储备系数
平衡的充要条件是
静态稳定储备系数定义为
小干扰法分析简单系统静态稳定
我们已经求得了转子的运动方程
代入电磁功率表达式,并在平衡点求线性化有
整步功率系数为
用于判断稳定性。
解出矩阵的特征值
得到
在稳定状态下,比整步功率系数大于 1,因此特征值一定为一对实部为零的共轭复根,即振荡频率
有阻尼时分析简单系统静态稳定
如果考虑阻尼绕组,则转子运动方程为
代入电磁功率表达式,并在平衡点求线性化有
再次求特征值
得到
- 若 $ S_\mathrm{Eq} < 0 $,则无论 $D$ 的大小,总有一个实部为正的特征值,系统将单调地失去稳定性。
- 若 $ S_\mathrm{Eq} > 0 $,则有两种情况:
- 若 $ D > 0 $,由于 $D$ 值一般不是很大,则特征值为一对实部为负的共轭复根,系统稳定。
- 若 $ D < 0 $,则特征值为一对实部为正的共轭复根,系统振荡失稳。
多机系统的静态稳定近似分析
多机系统过于复杂,我们以两机系统为例。
直接给结论,系统稳定时,两机的功角差 $\delta_{12}$ 满足
通常,我们近似地把送端发电机的功率极限作为整个系统的功率极限。
提高静态稳定性的措施
- 采用自动励磁调节器
- 减小元件的电抗
- 采用分裂导线
- 提高线路额定电压等级
- 采用串联电容补偿
- 改善系统的结构
- 增加输电线路回路数
- 增加中间电力系统
- 采用中间补偿设备
第五章 电力系统暂态稳定
简单系统的稳定性
在分析暂态稳定时,我们将整个过程分为三部分:故障前,故障时和故障后。下图为简单电力系统的暂态稳定分析示意图。
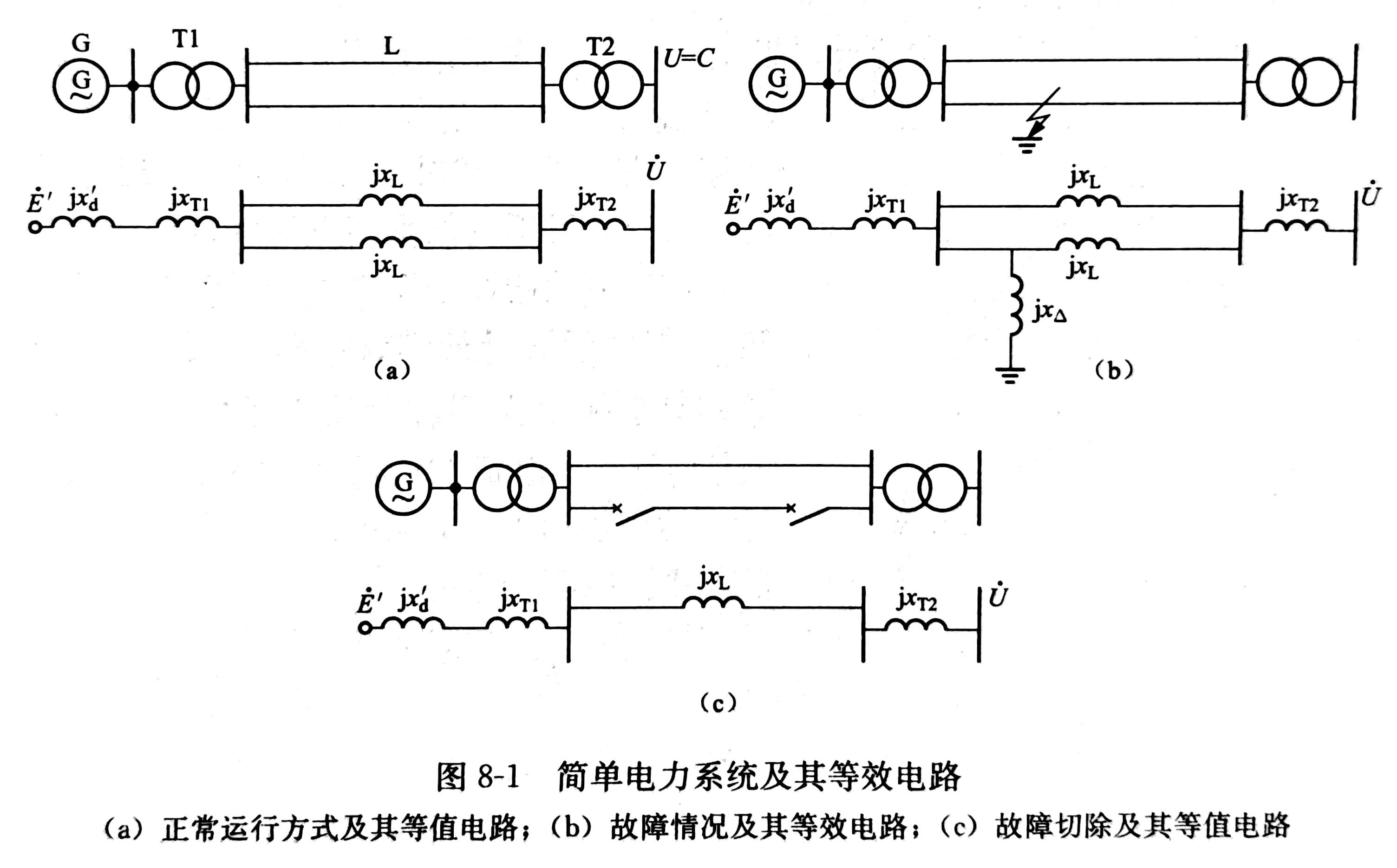
故障前
如果发电机以 $\dot{E}’$ 作为等值电动势,则电动势与无穷大系统之间的电抗为
电磁功率为
故障时
根据正序等效定则,只需要在故障点接上一个附加电抗 $x_\Delta$ 即形成正序增广网络。
我们可以用星三角变换转换成三角形网络,电动势与无穷大系统之间的电抗为
同样,电磁功率为
如果是三相短路,那么发电机和系统之间的联系就被切断了,电磁功率为 0.
故障后
此时,继电保护系统切断了故障线路。
电动势与无穷大系统之间的电抗为
电磁功率为
等面积定则
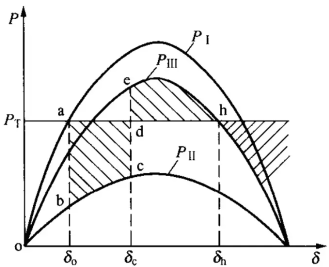
图上标出了三个过程的功率特性曲线。直线 $P_\mathrm{T}=P_0$ 表示输入机械功率,是一个定值,其与曲线围成图形的面积表示了转子的加速情况。
显然,转子必须在到达 h 点前恢复同步速,否则就会彻底失稳。根据等面积定则有以下关系
由此可以计算出极限切除角。其中,角度均用弧度制表示。
改进欧拉法
了解一下即可,这是用于计算机计算稳定性的算法。
假设初态为 $(\delta_0, 1)$,计算极限切除角。分六步走
- 确定步长
- 计算当前点变化率
- 根据计算的变化率和步长,计算第一次估计值
- 根据计算好的估计值,再次计算变化率
- 求平均变化率
- 根据平均变化率和步长,计算下一点的估计值
重复以上步骤即可。
提高暂态稳定性的措施
- 快速切除故障
- 采用自动重合闸
- 提高发电机输出的电磁功率
- 对发电机进行强励
- 电气制动
- 变压器中性点经小电阻接地
- 减少原动机输出的机械功率